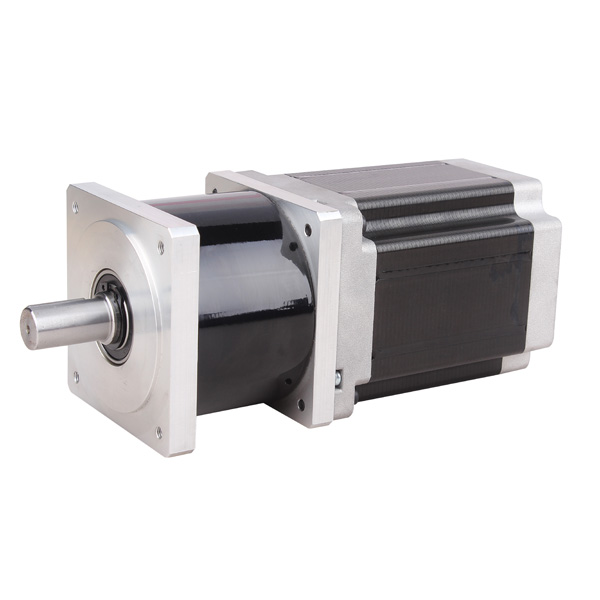
8mm Planetary Gearbox Supplier Manufacturer – high voltage digital display 220V Nema42 closed loop 12Nm stepper motor – Bobet
8mm Planetary Gearbox Supplier Manufacturer – high voltage digital display 220V Nema42 closed loop 12Nm stepper motor – Bobet Detail:
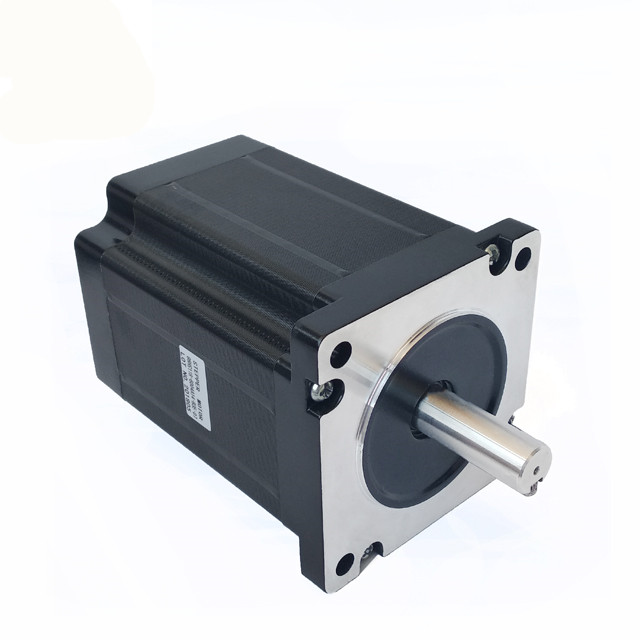
NEMA42 Easy Servo Series(NEMA42 Closed Loop series)
Motor Eelctrical Parameters:
| Mode | Step angle | Current (A) | Resistance (Ω±10%) |
Inductance (mH±20%) |
Holding torque(N.m) | Motor length(mm) |
Encoder Resolution(PPR) |
Applicable Driver |
| 110HCE12N-B39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
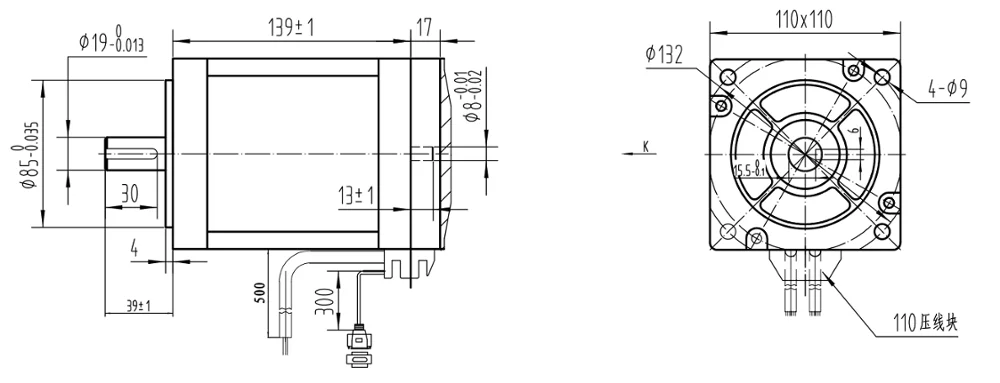
Motor dimension:mm
Torque/Frequency Curve
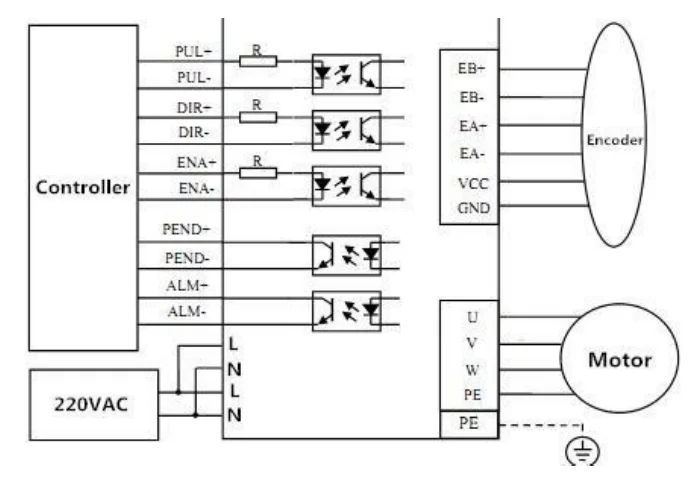
Driver 3HSS2260
Features
1, 32-bit DSP and vector closed-loop control technology
2, Without losing step, high accuracy in position
3, Improve the motor output torque and working speed
4, Variable current control technology, restrain motor temperature rise
5, Adapt to variety of mechanical load conditions(including low-rigidity pulleys), no
need to adjust the gain parameter
6, Smooth and reliable moving, low vibration, great improvement in accelerate and
decelerate
7, The ability of zero speed static without vibration
8, Adapt to 3-phase 86(NEMA34) and 110(NEMA 42) hybrid servo motor
9, Maximum step-pulse frequency 200KHZ
10, Micro step 400-60000 pulse/rev
11, Voltage range AC150-240V
12, Over current, over voltage and over position protection
13, Six digital tube display, easy to set parameters and monitor the motor running
state
Microstep selection:
| Code |
Definition |
Range |
Default Value |
Remark |
|
PA0 |
Version Number | 501 | Prohibited to Modify | |
|
PA1 |
Control Mode Selection | 0~2 | 0 | |
|
PA2 |
Motor Type Selection | 0~2 | 0 | |
|
PA3 |
Power On Display | 0~7 | 0 | |
|
PA4 |
Current Loop Kp | 0~1000 | 200 | Prohibited to Modify |
|
PA5 |
Current Loop Ki | 0~1000 | 300 | Prohibited to Modify |
|
PA6 |
Position Loop Kp | 0~1000 | 300 | |
|
PA7 |
Micro Steps Setting | 400~60000 | 4000 | |
|
PA8 |
Encoder Resolution(1000) | 4000 | Prohibited to Modify | |
|
PA9 |
Encoder Resolution(1000) | 40~30000 | 1000 | |
|
PA10 |
Holding Current | 10~100 | 40 | |
|
PA11 |
Closed Loop Current | 10~100 | 100 | |
|
PA12 |
Reservation | |||
|
PA13 |
Reservation | |||
|
PA14 |
Enable Level | 0/1 | 0 | |
|
PA15 |
Alarm Level | 0/1 | 0 | |
|
PA16 |
Pulse Mode Selection |
0/1 |
0 |
|
| PA17 | Pulse Edge | 0/1 | 0 | |
| PA18 | Motor Rotation Direction | 0/1 | 0 | |
|
PA19 |
JOG Speed |
1~200 |
60 |
|
|
PA20 |
PEND Mode Section |
0/1 |
0 |
|
| PA21 | PEND Level | 0/1 | 0 |
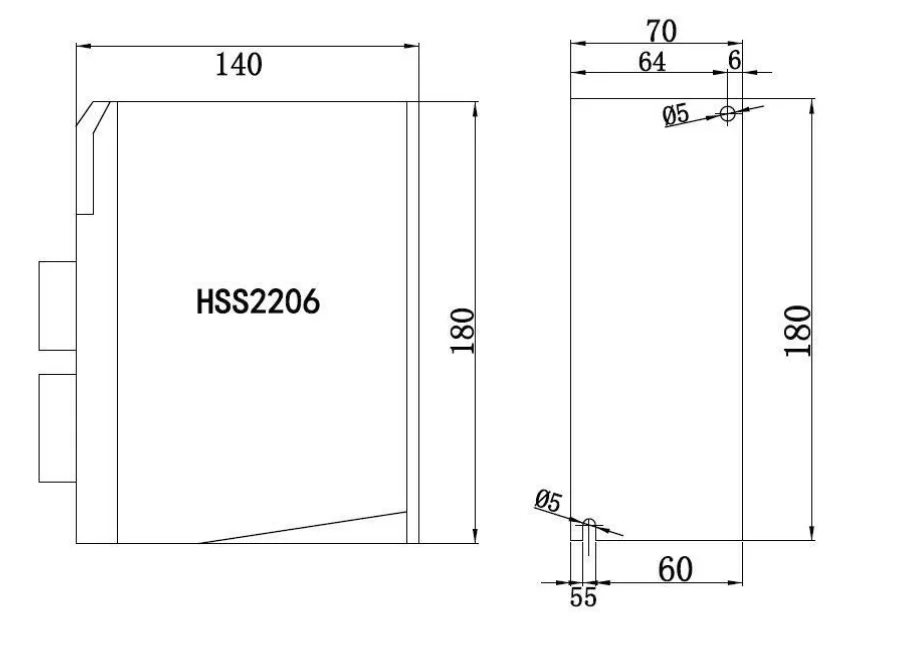
Driver dimension (mm):
Wiring Diagram:
Product detail pictures:


Related Product Guide:
Cooperation
We've been convinced that with joint efforts, the enterprise between us will bring us mutual benefits. We could guarantee you item excellent and aggressive price tag for 8mm Planetary Gearbox Supplier Manufacturer – high voltage digital display 220V Nema42 closed loop 12Nm stepper motor – Bobet , The product will supply to all over the world, such as: French, Czech, Sacramento, Our products have enjoyed a great reputation for their good quality, competitive prices and prompt shipment in international market. Presently, we are sincerely looking forward to cooperating with more overseas customers based on mutual benefits.




,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
The manufacturer gave us a big discount under the premise of ensuring the quality of products, thank you very much, we will select this company again.